Уровни автоматизации вождения
Согласно стандарту Society of Automotive Engineers (SAE) J3016, существует пять уровней автоматизации (шесть, если за нулевой принять полное отсутствие). Попробую рассмотреть их с точки зрения «автопилот как продукт».
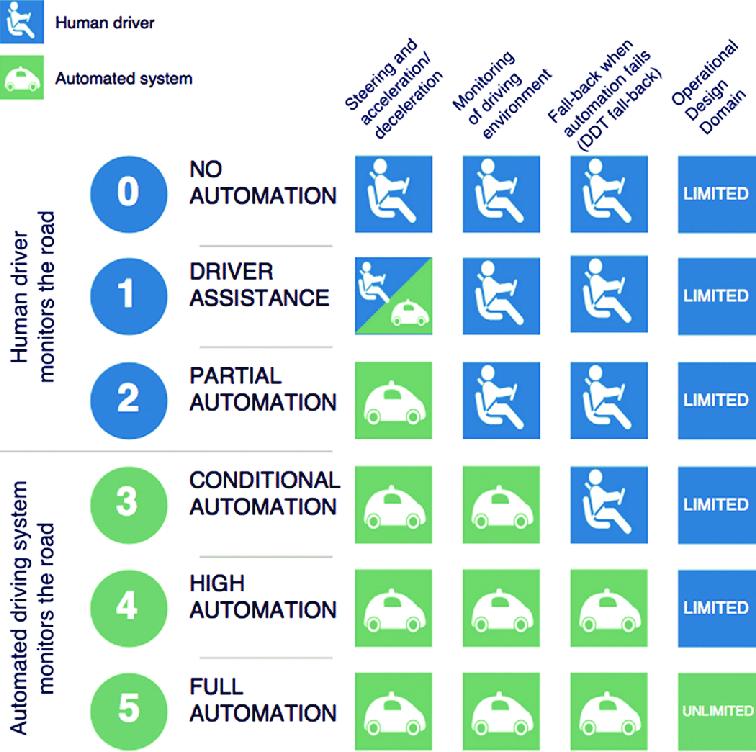
L0: Без автоматизации
- Никак не вмешивается в управление автомобилем
- При этом на нулевом уровне есть фичи для «усиливания» способностей человека воспринимать ситуацию и управлять автомобилем: антиблокировочная система, гидроусилитель руля, парктроник
- Полная ответственность за ситуацию на дороге на человеке
L1: Ассистирование
- Автоматизация одного измерения управления: продольные (газ/тормоз) ИЛИ поперечные (руль) маневры. Другой тип маневра делается человеком.
- Фичи: подруливания, удержание в полосе по дорожной разметке, корректировка скорости по впереди идущему автомобилю.
- Водитель следит за всеми действиями и готов в любой момент перехватить управление.
L2: Частичная
- Машина может самостоятельно решить задачу, комбинируя продольные и поперечные маневры, т. е. человек не нужен для совершения «динамической водительской задачи» (Dynamic Driving Task, DDT).
- Фичи: автоматическая парковка, смена полосы по всем правилам, активный круиз-контроль
- Водитель следит за всеми действиями и готов в любой момент перехватить управление.
L3: Условная
- Похоже на L2, но
- предусмотрены резервные системы для сенсоров
- отслеживается состояние водителя, чтобы в случае чего передать ему управление. Если водитель заигрался или уснул, то L3 будет всячески стараться привлечь его внимание и отказываться ехать.
- Водитель может отвлечься, но остается ответственным за действия автомобиля.
- Фичи: мониторинг состояния водителя, движение в спец. зоне
(пробка, склад, конкретный тип шоссе). - Широкого распространения не получили, т. к. сутево не отличаются от L2, но накладывают больше ограничений на производителя и пользователя.
L4: Высокая
- Полностью оперирует в заявленных условиях эксплуатации (Operation Design Domain, ODD).
- Фичи (а скорее продуктовые сценарии с понятным коммерческим потенциалом): перевозка груза со склада на склад между городами по шоссе, такси внутри города без заезда во двор, автоматическая остановка в безопасном месте и вызов оператора
- Высокоавтоматизированное транспортное средство (ВАТС) самостоятельно оперирует в рамках ODD, человек нужен только в нештатных ситуациях (сгодится удаленный оператор).
- Именно тут сейчас разгорается битва у БигТеха и миллиардных стартапов, в которой принимает участие ваш покорный слуга.
L5: Полная
- Автопилот самостоятельно действует в любых условиях, помощь человека не нужна ни в каком виде
- Интересный эффект на дизайн салона: можно рассмотреть полный отказ от руля и реорганизовать пространство
- Пока выглядит слишком утопично, т. к. непонятно, как гарантировать автономное и корректное действие в любых потенциальных ситуациях.
——
Реальные автомобили, конечно же, не разделены четко по этой схеме. Слишком много нюансов в понятиях «маневр» и «условия эксплуатации», чтобы все четко разложить по уровням. Автопроизводители могут дать фичей уровнем выше, но по документам идти как более простой автопилот.
Tesla тут яркий пример — она долгое время маркетировала себя как «полноценный автопилот», но по документам проходила как L2. Зачем это сделано? Чтобы в случае инцидента четко атрибутировать ответственность на водителя. Подробнее про маркетинг, его влияние на доверие к технологии и что с этим делают напишу в следующих постах.
Что еще важного, но о чем не сказано в стандарте. Уровень автоматизации не равен уровню безопасности, и SAE J3016 об этом явно пишет. Безопасность автопилота (как частный случай Physical AI Safety) имеет свои критерии. Про безопасность, методы оценки и повышения поговорим отдельно, т. к. этим я пристально занимаюсь.